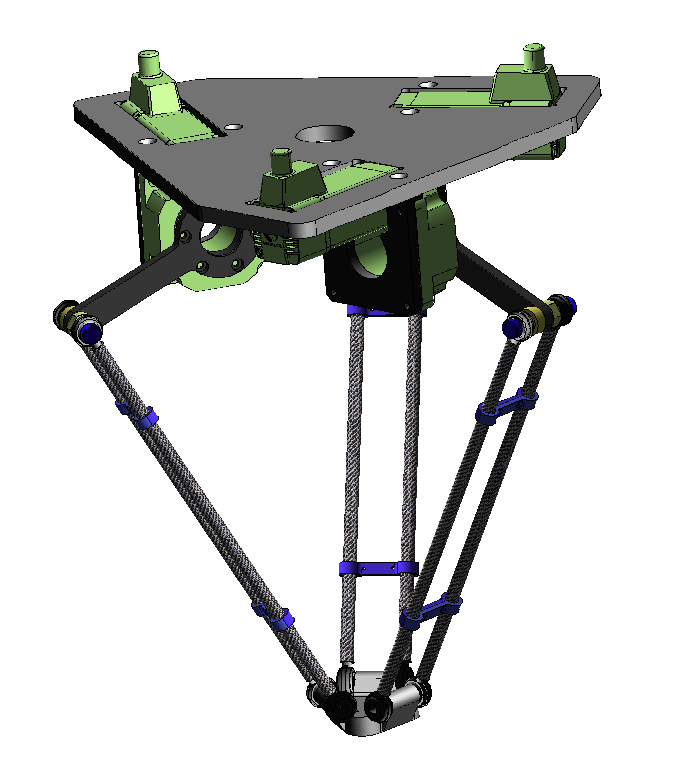
고속 Pick and place 용 소형 델타봇을 만들었습니다. 델타봇은 구동부가 베이스에 붙어 3개의 젓가락 같은 팔을 구동합니다. 로봇을 이렇게 만든 이유는, 팔의 관성을 줄여 모터의 적은 토크로 빠른 가감속을 하여 고속으로 움직이기 위함입니다.
델타봇과 같이 고속 Pick and place 용에 적합한 로봇이 SCARA 로봇입니다. 이 로봇도 팔의 관성을 줄이기 위해 모터는 되도록 로어 암 쪽에 배치하게 됩니다. 빠른 로봇은 초당 3번 정도 작업이 가능합니다. 한 번 움직이는데 300ms 정도이니 굉장합니다.
이번에 만든 델타봇은 Payload가 크지 않아 인코더 있는 스텝 모터를 사용했고 18:1의 Pinion 일체형 감속기를 사용했습니다. 설계 사양은 아래 표와 같습니다.
|
항목
|
사양
|
|
구동 축 수
|
3축
|
|
구동 모터
|
2상 Stepper
|
|
인코더 해상도
|
10,000 [cpr]
|
|
감속기 종류
|
Pinion 일체형
|
|
감속비
|
18 : 1
|
|
감속기 위치 정밀도
|
±15 sec (0.004º)
|
|
말단 위치 정밀도
|
50 [us]
|
|
말단 최고 속도
|
1 [m/s]
|
|
말단 최고 가속도
|
5 [m/s]
|
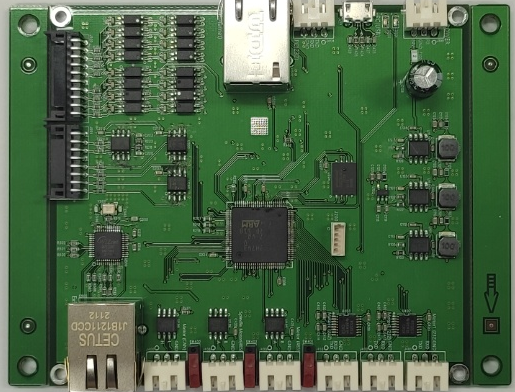
델타봇을 구동하기 위해 STM32H743 MCU로 모션 컨트롤러도 만들었습니다. 이 모션 컨트롤러로 Deltabot, WTR(Wafer Transfer Robot), SCARA, 수직 다관절 로봇 등 다양한 로봇을 구동 가능합니다. movl, movj와 같은 로봇 스크립트도 사용 가능하고, G-code 인터프리터도 내장하였습니다.
|
항목
|
사양
|
비고
|
|
입력 전원
|
DC 24[V] ±10%, 3[A]
|
|
|
제어 가능 축 수
|
3 ~ 6 축
|
|
|
통신 Interface
|
USB – 1ch
Ethernet 10/1000 Base T
RS-485 - 2ch
CAN - 2ch
|
USB – PC 모니터링/모션 튜닝
EtherNET – PC, I/O 연결
RS-485 – 모터 드라이버 연결
CAN - 모터 드라이버 연결
|
|
Axis I/O
|
입력 8점
|
Org, Limit+, Limit-, Aux-in0
|
|
출력 8점
|
Alarm, In-pos, Aux-out0,
|
|
|
Analog I/O
|
입력 4점 (12 bit ADC)
|
|
|
출력 2점 (12 bit DAC)
|
|
|
|
Servo update time
|
500 [us] 이하
|
Position loop 기준
|
|
Programming
|
Robot lang,
G-code interpreter
|
원호, 직선, 스플라인 보간,
G-code I/F
|
|
Additional Requirements
|
PC 용 인터페이스,
카메라 트리거 신호,
컨베이어 구동
|
|
모션 컨트롤러에서 델타봇을 구동하기 위한 프로그램을 다음과 같이 스크립트로 작성합니다. 기존 수직다관절 로봇에서 사용되는 movl, movj 등과 같은 명령어들로 로봇의 이동 궤적을 만들어냅니다. 물론 이동 속도를 높이기 위한 블랜딩 옵션도 있습니다.
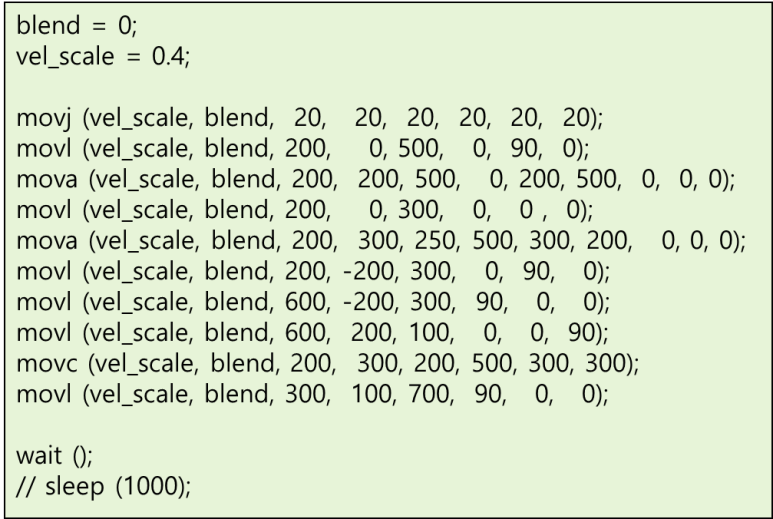
잘 구동됩니다.
'로봇' 카테고리의 다른 글
| Base, Tool offset이 있을 때의 SCARA 로봇 기구학 파라미터 오차 보정 (0) | 2023.10.08 |
|---|---|
| SCARA 로봇의 기구학 파라메터 오차 보정(Levenberg–Marquardt method) (1) | 2023.10.08 |
| 로봇 조인트의 영점 보정(Gauss-Newton method) (0) | 2023.10.08 |
| 비선형 연립 방정식 풀이 (Newton-Raphson method) (0) | 2023.10.08 |
| 바이오 메디컬 로봇 소개 (0) | 2023.10.08 |



