ODE를 사용한 로보틱스 시뮬레이터 예제의 연속편입니다. 본 예제는 차동바퀴형 이동 로봇에 카메라 센서를 부착하여 이미지를 얻는 센서 프로그램 인데, 지금까지의 예제와 달리 ODE의 기능을 이용하여 만들어졌다기보다 OpenGL의 기능을 이용하여 만들어졌습니다. 하지만 시뮬레이터에서 카메라 입력을 시뮬레이션 하는 경우가 많기때문에 구현하여 보았습니다.
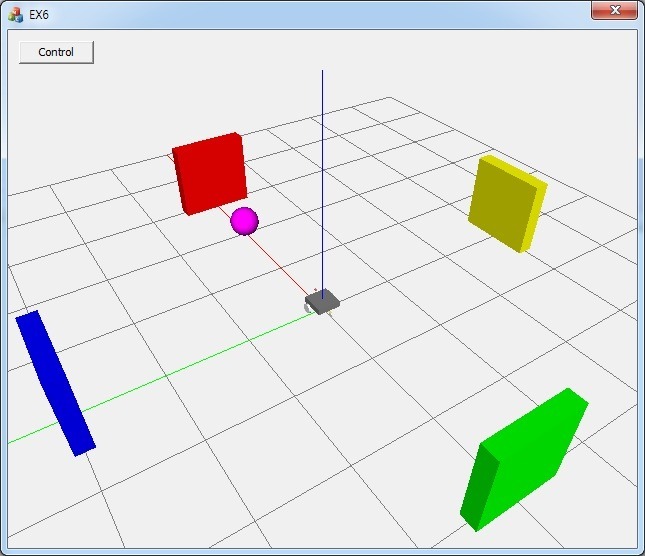
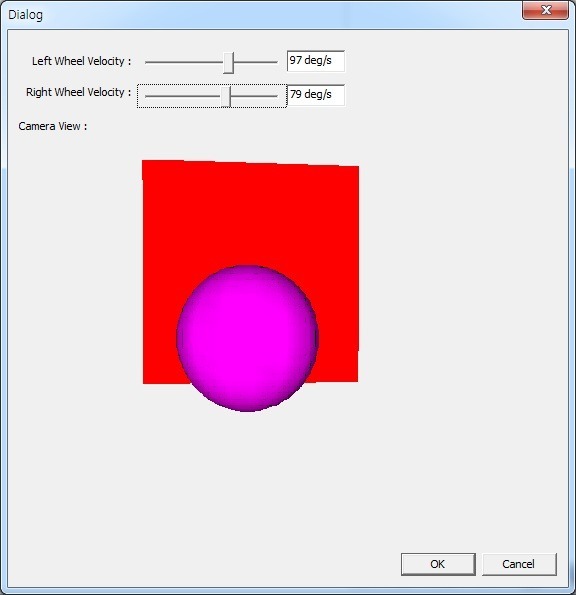
윈도우의 좌측 상단 [Control] 버튼을 누르면 바퀴의 속도를 설정하는 다이얼로그가 실행됩니다. 여기서 바퀴의 속도를 조절함으로서 로봇을 이동시킬 수 있습니다. 로봇이 이동하면서 들어오는 카메라 입력 영상을 확인하기 바랍니다.
다음 예제 프로젝트를 다운받아 컴파일 하고 실행해 보시기 바랍니다. 예제 프로젝트는 Visual C++ 2008로 작성되었고, Windows XP, 7에서 테스트 되었습니다. ODE 라이브러리는 예제 프로젝트에 포함되어 있기때문에 따로 받을 필요는 없습니다.
다음 문서는 ODE wrapper class의 API 메뉴얼입니다.
ODE Robotics Example.pdf
0.48MB