ODE를 사용한 로보틱스 시뮬레이터 예제의 연속편입니다. 본 예제는 2Link 로봇에 Force, Torque, Gyro, 가속도 센서를 부착하여 End Effector에 작용하는 force, torque와 각속도, 가속도를 측정할수 있는 센서 프로그램 입니다.
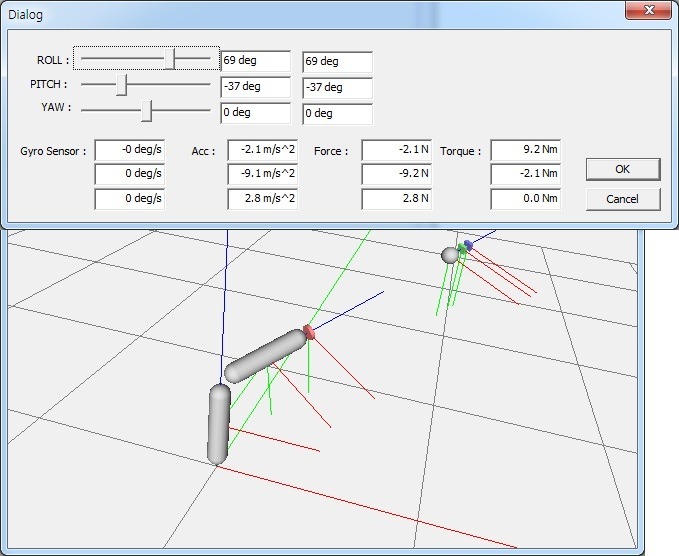
윈도우의 좌측 상단 [Control] 버튼을 누르면 매니퓰레이터의 조인트 회전각을 설정하는 다이얼로그가 실행됩니다. 여기서 조인트의 회전각을 조절함으로서 매니퓰레이터의 자세를 바꿀 수 있습니다. 그리고 매니퓰레이터 종단에 붙어있는 자이로 센서와 가속도 센서에서 측정되는 각속도와 가속도 값을 살펴보시기 바랍니다.
* Force/Torque 센서는 다른 센서들과 달리 두 링크를 연결하는 사이에 붙어야 하며, 두 링크 사이에서 작용하는 힘과 토크를 측정하게 됩니다.
다음 예제 프로젝트를 다운받아 컴파일 하고 실행해 보시기 바랍니다. 예제 프로젝트는 Visual C++ 2008로 작성되었고, Windows XP, 7에서 테스트 되었습니다. ODE 라이브러리는 예제 프로젝트에 포함되어 있기때문에 따로 받을 필요는 없습니다.
다음 문서는 ODE wrapper class의 API 메뉴얼입니다.
ODE Robotics Example.pdf
0.48MB