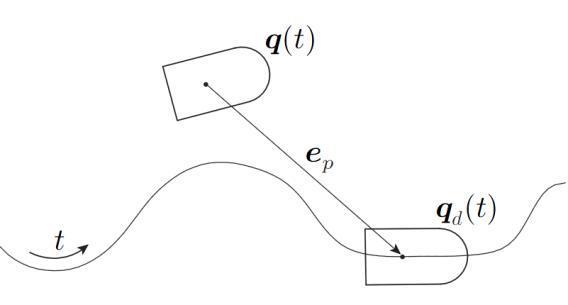
Trajectory Tracking이란 로봇이 경로상에 있거나 있지 않은 위치로부터 로봇의 경로를 점근적으로 따라가도록 제어하는 방법을 말합니다.
여기서는 다음 3가지 방법에 대하여 소개합니다.
- Approximate linearization
- Nonlinear control
- Input/output linearization
자세한 내용은 아래 파일을 참조하시기 바랍니다.
Trajectory Tracking.pdf
0.14MB
아래는 3가지 방법에 대한 예제 코드와 프로그램의 실행 동영상입니다.
Approximate linearization
trajectory_tracking_linear.zip
0.07MB
Nonlinear control
trajectory_tracking_nonlinear.zip
0.07MB
Input/output linearization
trajectory_tracking_io_linearization.zip
0.07MB