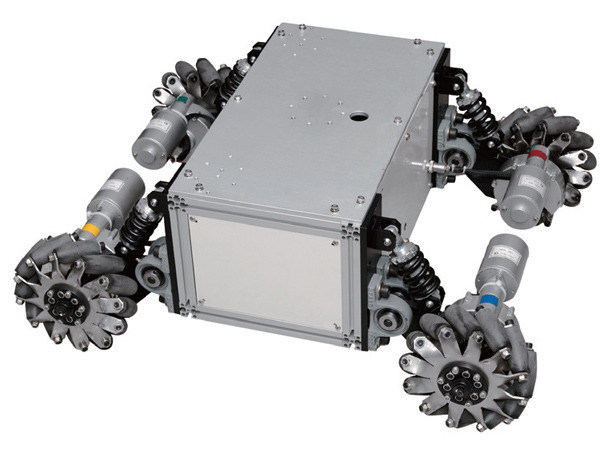
Swedish wheel은 모터의 구동 방향과 동일하게 회전하는 바퀴에 회전축과 45도 각을 이루면서 자유롭게 회전 가능한 작은 바퀴들이 다수 배치되어 있습니다. 4개의 Swedish wheels을 배치하여 전방향 이동체를 다음 그림과 같이 만들 수 있습니다.

이에 대한 정기구학(forward kinematics)과 역기구학(inverse kinemtaics)을 다음 문서에서 자세히 정리합니다.
Mobile Robot Kinemaitcs-4swedish wheel.pdf
0.19MB