이전 글에서 ICP 알고리즘으로 지도 모델과 레이저 스캐너로 측정한 데이터간의 매칭 과정을 시뮬레이션해 보았습니다. 이번에는 실제로 저희 생기원 내 환경을 호쿠요 레이저 스캐너 UTM-30LX로 떠서 파일로 저장하였고, 이 데이터를 불러와 ICP 알고리즘으로 지도를 복원하는 실험을 하였습니다. 처음에는 시뮬레이터로 잘 되었기 때문에 실전에서도 별 어려움 없이 될 줄 알았는데 생각과 달리 잘 되지 않았습니다. 측정 거리, 반복횟수, 종료조건 설정, 아웃라이어 제거를 위한 임계값 설정 등 여러 파라메터 세팅에 따라 결과가 많이 달랐습니다.
소스코드와 레이저 스캐너로 획득한 데이터를 올립니다. 아무래도 실전에서 활용하기에는 여러 파라메터를 적절히 설정하는데 어려움이 있지 않을까 합니다.
icp_test.zip
0.32MB
download data file: laser.bin (94MB)
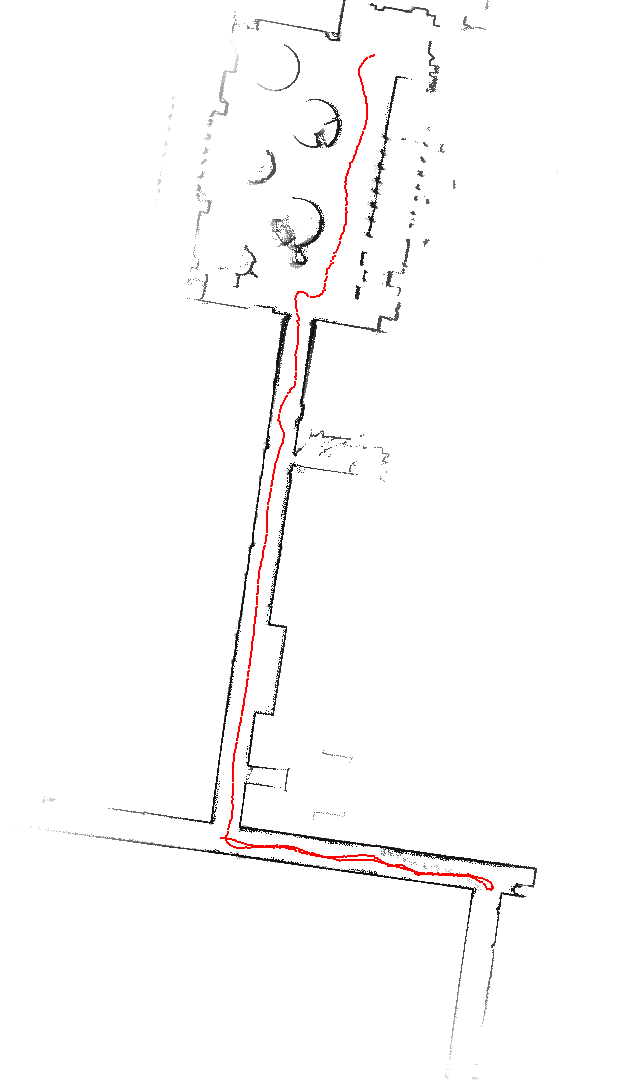
아래 이미지 들은 ICP 알고리즘으로 복원한 지도들입니다.
원본 이미지:
{kind=link}
icp1.png
0.05MB
{kind=link}
icp2.png
0.15MB

ICP 알고리즘을 사용한 맵 빌딩
ICP 알고리즘을 사용하지 않고 Dead-reckoning 만으로 맵 빌딩